After watching a few augmented reality videos on YouTube I thought of trying to make my own but without the image processing section I was only interested in finding a 3D plane using on 4 Projected points. the results are below I used simple Calculus 2 equations the equation of a straight line, distance between 2 points and finding the normal of a plane. Another purpose of this I was convinced if I can find the plane in 3D space I can work out the cameras Location, LookAt and Up vectors.
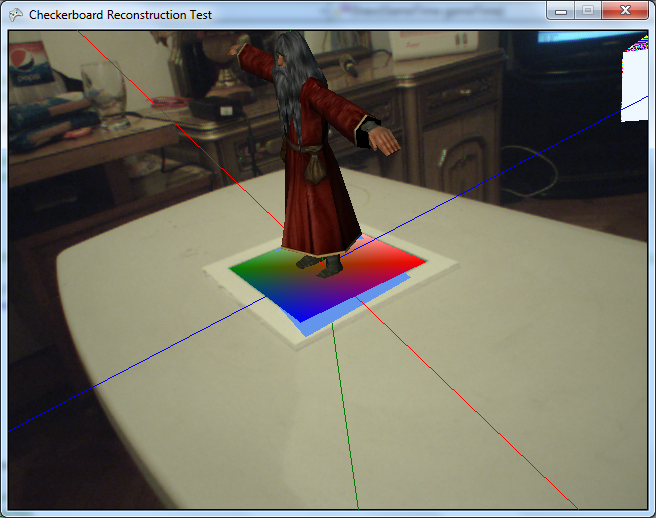
results are shown below. the 3 coloured lines represent the 3 axis.

the results was okay but I was happy when testing other cases so I made different tests in case the plane was tilted on two axes, it was not perfect it also took more time in running the application. but the results were more accurate

results are shown below. the 3 coloured lines represent the 3 axis.

the results was okay but I was happy when testing other cases so I made different tests in case the plane was tilted on two axes, it was not perfect it also took more time in running the application. but the results were more accurate